Hello! I am Shrenik. I am a PhD candidate in Mechanical Engineering at Purdue University. I hold an undergraduate degree from the Indian Institute of Technology Madras (IITM), India.
My research background lies in scientific machine learning, uncertainty quantification, causal AI, inverse problems, information field theory, digital twins, stochastic modeling, control, robotics and reinforcement learning advised by Prof. Ilias Bilionis. I am especially interested in how mathematics and machine learning can work together to solve real world engineering problems.
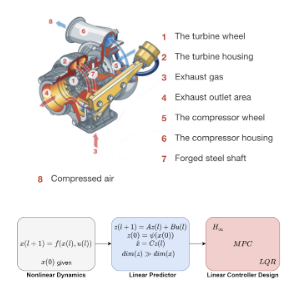
In Summer 2025, I was a Research Intern at Mitsubishi Electric Research Laboratories (MERL), Cambridge, MA, where I worked on Bayesian model calibration of large scale vapor compression cycles using experimental data. In Summer 2024, I was a Physics-Informed Machine Learning Intern at RTX Technology Research Center, East Hartford, CT.
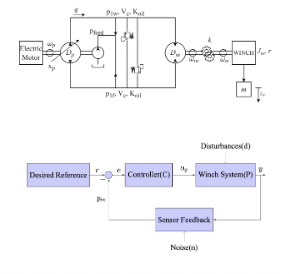
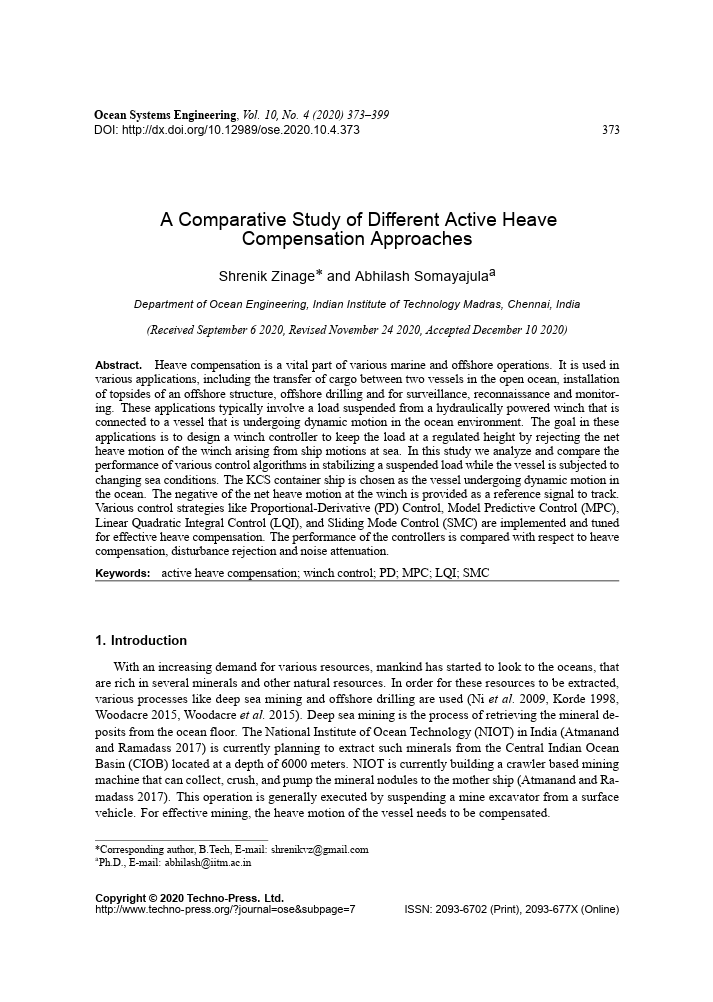
Prior to joining Purdue university, I worked with Prof. Abhilash Somayajula at IITM on comprehensive comparative study of various control methodologies, ranging from classical based controllers to AI based controllers, with a specific application in active heave compensation.
I am actively seeking full time opportunities in these areas and would be glad to connect if you think I might be a good fit!
You can reach me at szinage@purdue.edu.
Latest News
- Oct 2025 – Paper submitted to American Control Conference.
- Aug 2025 – Completed summer internship at Mitsubishi Electric Research Laboratories.
- May 2025 – Started summer internship at Mitsubishi Electric Research Laboratories.
- May 2025 – Passed preliminary examination!
- Feb 2025 – Paper accepted at International Journal of Engine Research (IJER).
- Jan 2025 – Paper published at AIAA SciTech.
- Dec 2024 – Paper submitted to ACM Transactions on Intelligent Systems and Technology.
- Oct 2024 – Paper submitted to International Journal of Engine Research (IJER).
- Aug 2024 – Paper accepted at AIAA SciTech.
- Aug 2024 – Completed summer internship at RTX Technology Research Center.
- May 2024 – Started summer internship at RTX Technology Research Center.
- May 2024 – Paper submitted to AIAA SciTech.
- Mar 2024 – Received special recognition from Purdue University for contributions to high‑profile projects, efficiency improvement and departmental efficiency.
- Jan 2023 – Passed PhD area exam!